Symmetry-adapted tensor#
This example shows how to calculate irreps of crystallographic point groups and construct projection operator on identity representation. We apply the projection operator to obtaining symmetry-adapted tensor (e.g. elastic constant).
Import modules#
[1]:
from __future__ import annotations
import matplotlib.pyplot as plt
import numpy as np
import seaborn as sns
from spglib import get_symmetry_from_database
import spgrep
from spgrep import get_crystallographic_pointgroup_irreps_from_symmetry
from spgrep.group import get_cayley_table
from spgrep.representation import is_representation, project_to_irrep
from spgrep.tensor import get_symmetry_adapted_tensors, apply_intrinsic_symmetry
print(f"spgrep=={spgrep.__version__}")
spgrep==0.3.4.dev177+gd763494
[2]:
sns.set_context("poster")
Prepare point-group operations and representation#
We consider crystallographic point group \(m\overline{3}m\).
[3]:
# Pm-3m (No. 221)
symmetry = get_symmetry_from_database(hall_number=517)
rotations = symmetry["rotations"] # (48, 3, 3)
Then, we define basis of strain tensors in Voigt order:
A rotation \(R\) in point group \(\mathcal{P}\) acts the basis of strain tensors as
where \(\mathbf{R}\) is a matrix representation of rotation \(R\). We define a representation matrix for this action as
[4]:
def get_standard_basis() -> list[np.ndarray]:
# Basis for symmetric matrix in Voigt order (xx, yy, zz, yz, zx, xy)
basis = [
np.array(
[
[1, 0, 0],
[0, 0, 0],
[0, 0, 0],
],
dtype=np.float64,
),
np.array(
[
[0, 0, 0],
[0, 1, 0],
[0, 0, 0],
],
dtype=np.float64,
),
np.array(
[
[0, 0, 0],
[0, 0, 0],
[0, 0, 1],
],
dtype=np.float64,
),
np.array(
[
[0, 0, 0],
[0, 0, 1],
[0, 1, 0],
],
dtype=np.float64,
)
/ np.sqrt(2),
np.array(
[
[0, 0, 1],
[0, 0, 0],
[1, 0, 0],
],
dtype=np.float64,
)
/ np.sqrt(2),
np.array(
[
[0, 1, 0],
[1, 0, 0],
[0, 0, 0],
],
dtype=np.float64,
)
/ np.sqrt(2),
]
return basis
def get_representation_on_symmetric_matrix(rotations: np.ndarray) -> np.ndarray:
# take [e_{1,1}, e_{2,2}, e_{3,3}, e_{2,3}, e_{3,1}, e_{1,2}] as basis
basis = get_standard_basis()
rep = np.zeros((len(rotations), len(basis), len(basis)))
for pos, rotation in enumerate(rotations):
for j, bj in enumerate(basis):
# operated = rotation.T @ bj @ rotation
operated = rotation @ bj @ rotation.T
for i, bi in enumerate(basis):
rep[pos, i, j] = np.sum(operated * bi) / np.sum(bi * bi)
# Sanity check if `rep` satisfy property of representation
table = get_cayley_table(rotations)
assert is_representation(rep, table)
return rep
rep = get_representation_on_symmetric_matrix(rotations)
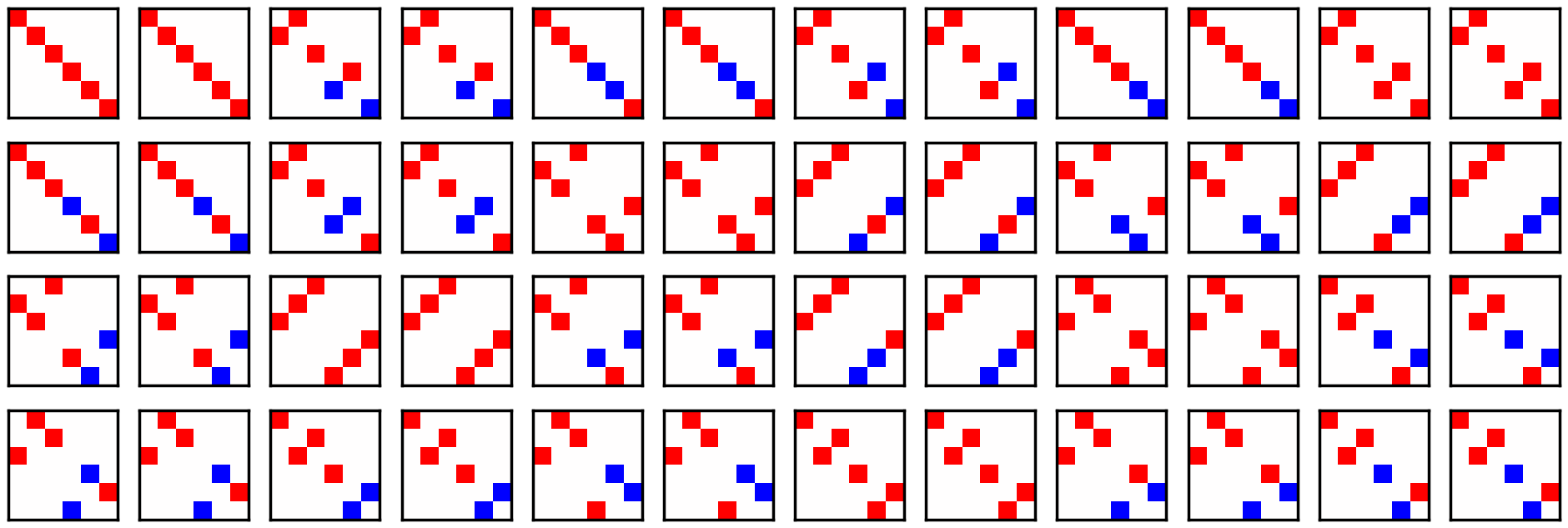
Of course, the representation matrices are not block-diagonalized:
[5]:
nrows = 4
ncols = 12
fig, axes = plt.subplots(nrows, ncols, figsize=(2 * ncols, 2 * nrows))
for row in range(nrows):
for col in range(ncols):
idx = row * ncols + col
ax = axes[row][col]
ax.imshow(rep[idx], cmap="bwr", vmin=-1, vmax=1)
ax.set_aspect("equal")
ax.set_xticks([])
ax.set_yticks([])
Calculate physically irreducible representation#
For strain tensors, we need to consider representation over real number \(\mathbb{R}\). The spgrep.get_crystallographic_pointgroup_irreps_from_symmetry with real=True returns all unitary irreps over real number \(\mathbb{R}\) (also called as physically irreducible representation).
[6]:
irreps = get_crystallographic_pointgroup_irreps_from_symmetry(rotations, real=True)
Basis functions for each irrep can be obtained by spgrep.representation.project_to_irrep:
[7]:
all_basis = []
for irrep in irreps:
list_basis = project_to_irrep(rep, irrep)
for basis in list_basis:
all_basis.append(basis)
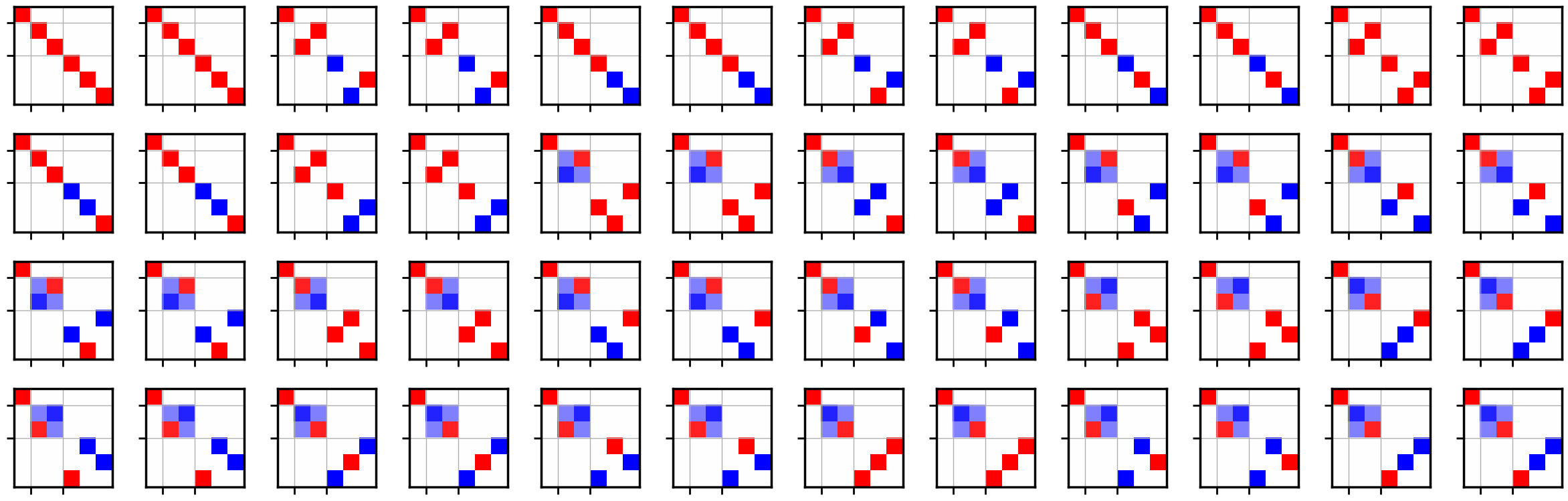
We can confirm the representation \(\Gamma\) is decomposed to three irreps: a one-dimensional, a two-dimensional, and a three-dimensional ones.
[8]:
fig, axes = plt.subplots(nrows, ncols, figsize=(2 * ncols, 2 * nrows))
for row in range(nrows):
for col in range(ncols):
idx = row * ncols + col
ax = axes[row][col]
rep_transformed = np.concatenate(all_basis) @ rep[idx] @ np.concatenate(all_basis).T
ax.imshow(rep_transformed, cmap="bwr", vmin=-1, vmax=1, aspect="equal")
ax.set_xticks([])
ax.set_yticks([])
ax.set_xticks([0.5, 2.5], minor=True)
ax.set_yticks([0.5, 2.5], minor=True)
ax.grid(which="minor", linewidth=1)
plt.tight_layout()
Calculate symmetry-adapted tensors#
[9]:
expects = [1, 3, 6, 11]
for rank, expect in zip(range(1, len(expects) + 1), expects):
tensors = get_symmetry_adapted_tensors(rep, rotations, rank, real=True)
sym_tensors = apply_intrinsic_symmetry(tensors)
print(f"Rank={rank}: {len(sym_tensors)}")
assert len(sym_tensors) == expect
Rank=1: 1
Rank=2: 3
Rank=3: 6
Rank=4: 11